Morpheus Team
University of Padua Mars Rover Team
Building the future of space exploration robotics
Scorri
University of Padua Mars Rover Team
Building the future of space exploration robotics
MORPHEUS is a student-led rover project dedicated to designing, engineering, and building a next-generation robotic explorer for the European Rover Challenge (ERC) in Kraków, Poland. The competition recreates a realistic Martian landscape where university teams from around Europe test their rover in mission scenarios inspired by real Mars expeditions. Our project blends mechanical engineering, electronics, embedded systems, robotics, autonomy, and computer science into a single integrated mission. Working with MORPHEUS offers students the opportunity to participate in a space-themed robotics challenge, contribute to a real engineering system, earn a project-based Thesis, and receive an official Open Badge certification from the University recognizing their work and skills.
Studenti
Dipartimenti
Nazionalità

L'European Rover Challenge (ERC) è una delle più grandi e prestigiose competizioni di robotica al mondo, focalizzata sulle tecnologie di esplorazione spaziale. Tenuta annualmente in Polonia, l'ERC riunisce squadre provenienti da università, istituti di ricerca e aziende private per progettare, costruire e operare rover robotici capaci di eseguire compiti in ambienti extraterrestri simulati.
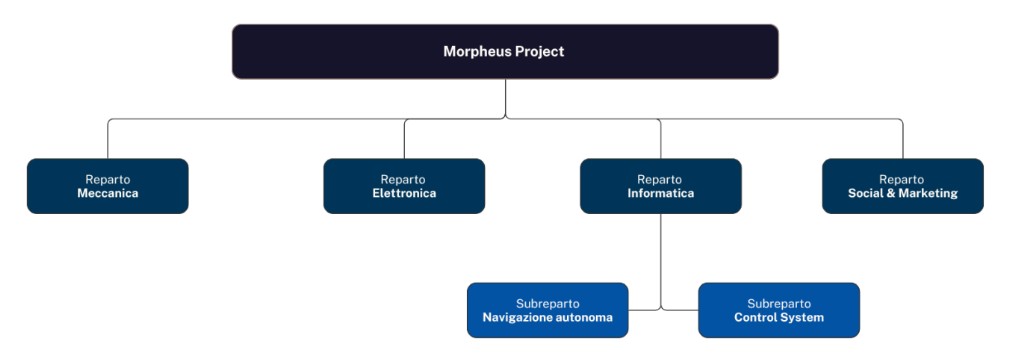
Il Team Meccanico è responsabile della progettazione dell'intera architettura meccanica del rover, dal telaio e dalle sospensioni ai sottosistemi termici e strutturali. Trasformiamo i requisiti della missione in progetti robusti e ottimizzati utilizzando simulazioni avanzate, studi cinematici e flussi di lavoro automatizzati SolidWorks. Il nostro lavoro integra:

Il Team Elettronica è responsabile della progettazione dell'intera spina dorsale di alimentazione e comunicazione del rover.
Sviluppiamo mission-critical hardware che assicura che ogni sottosistema – dalla mobilità al braccio robotico
e ai payload scientifici – operi con la massima precisione e affidabilità.
Il nostro lavoro integra e gestisce:
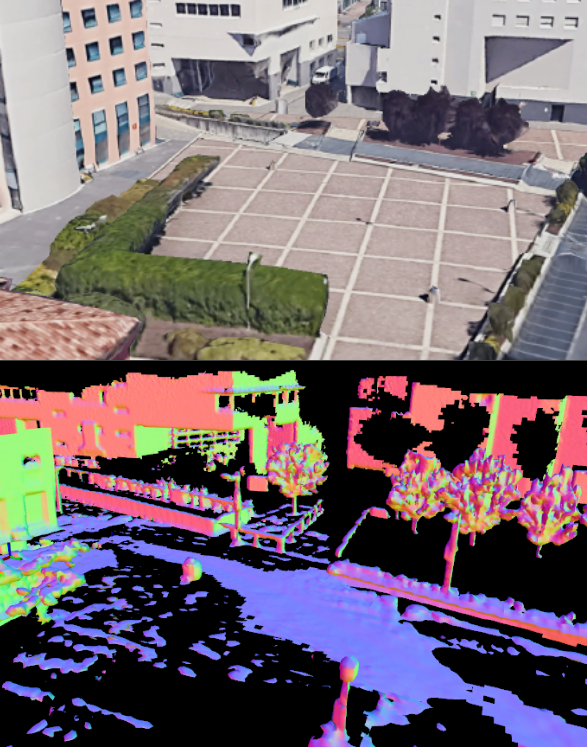
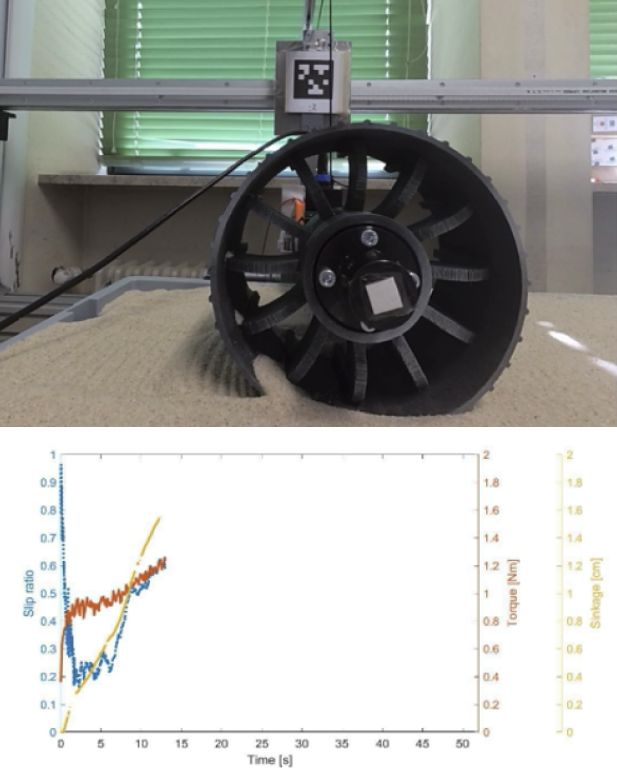
Il Team Informatico è responsabile dell'intero livello di intelligenza software del rover, dal controllo di basso livello all'autonomia di alto livello.
Progettiamo, implementiamo e integriamo il framework computazionale che consente
al rover di percepire l'ambiente circostante, prendere decisioni informate ed eseguire missioni complesse con precisione e resilienza.
Il nostro lavoro comprende:
Below you will find the entire collection of Mars rovers built by the Morpheus team in recent years

The team's first prototype was built in 2018, using Arduino protocols to manage the various integrated systems. Dimensions are 820 x 1320 x 1000 mm and the estimated weight is 46 kg.

The team's second prototype, which has yet to be built, is similar to the previous one, with the addition of UAVs. Its estimated footprint is 1300 x 1100 x 600 mm.

Feel free to contact us: we will be glad to provide you with information. Use the form below or follow us on our social media channels.